ESP8266实现WiFi遥控小车
概述
本项目使用 ESP8266 开发板和 L298N 电机驱动模块实现 WiFi 遥控小车,并使用 Blinker APP 进行遥控。
核心组件
ESP8266 开发板是基于 ESP8266 微控制器的开发板,它集成了 WiFi 功能,可以通过 WiFi 连接到网络,实现遥控控制。
L298N 电机驱动模块是双电机驱动模块,用于控制小车的运动方向。
物料
硬件
| 名称 | 数量 | 总价 | 备注 |
|---|---|---|---|
| ESP8266 | 1 | 10元 | |
| 小车底盘+电机*4 | 1套 | ¥23.7 | |
| L298N电机驱动模块 | 1 | ¥7.4 | |
| 18650锂电池(带线) | 2 | ¥24 | |
| 18650锂电池盒(2节串联类型) | 1 | ¥2.4 | 连接到电机驱动模块 |
| 杜邦线(母对母) | 6 | ¥0.6 | 用于连接开发板和电机驱动模块 |
| 导线 | 8 | ¥0.4 | 用于连接电机驱动模块和电机,红黑各4根 |
软件
| 名称 | 版本 | 下载链接 | 备注 |
|---|---|---|---|
| Arduino | 1.8.9 | https://www.arduino.cc/en/software | 用于编写代码 |
| Blinker | 2.6.5 | https://diandeng.tech/home | 用于WiFi遥控 |
工具
| 名称 | 用途 | 备注 |
|---|---|---|
| 电脑 | 编写代码 | Windows 11 |
| 手机 | 安装Blinker APP | 华为Mate 30,鸿蒙4.2 |
| 螺丝刀 | 安装小车组件 | |
| 数据线 | 连接开发板和电脑 | |
| 电烙铁 | 将导线焊接到电机上 | |
| 直流电源 | 测试电机转动方向 | 可用电池替代 |
原理
电源
使用两节 18650 电池(3.7V),串联提供 7.4V 电压作为小车电源。电源直接给 L298N 电机驱动模块供电,从 L298N 引出 5V 电压给 ESP8266 开发板供电。
电机驱动
使用 L298N 电机驱动模块,有两组控制输出引脚,分别对应左侧电机和右侧电机。ESP8266 开发板通过控制 L298N 电机驱动模块的引脚,实现对电机的控制。
运动控制
使用 ESP8266 开发板作为主控,接收从 Blinker APP 发送的指令,根据指令切换给 L298N 电机驱动模块的引脚高低电平,完成对电机的转向控制,最终实现小车的前进、后退、左转、右转控制。
远程遥控
将 ESP8266 注册到 Blinker APP 中,通过使用 Blinker APP 进行遥控,点击 APP 中的按钮,小车会根据按钮的状态进行运动。
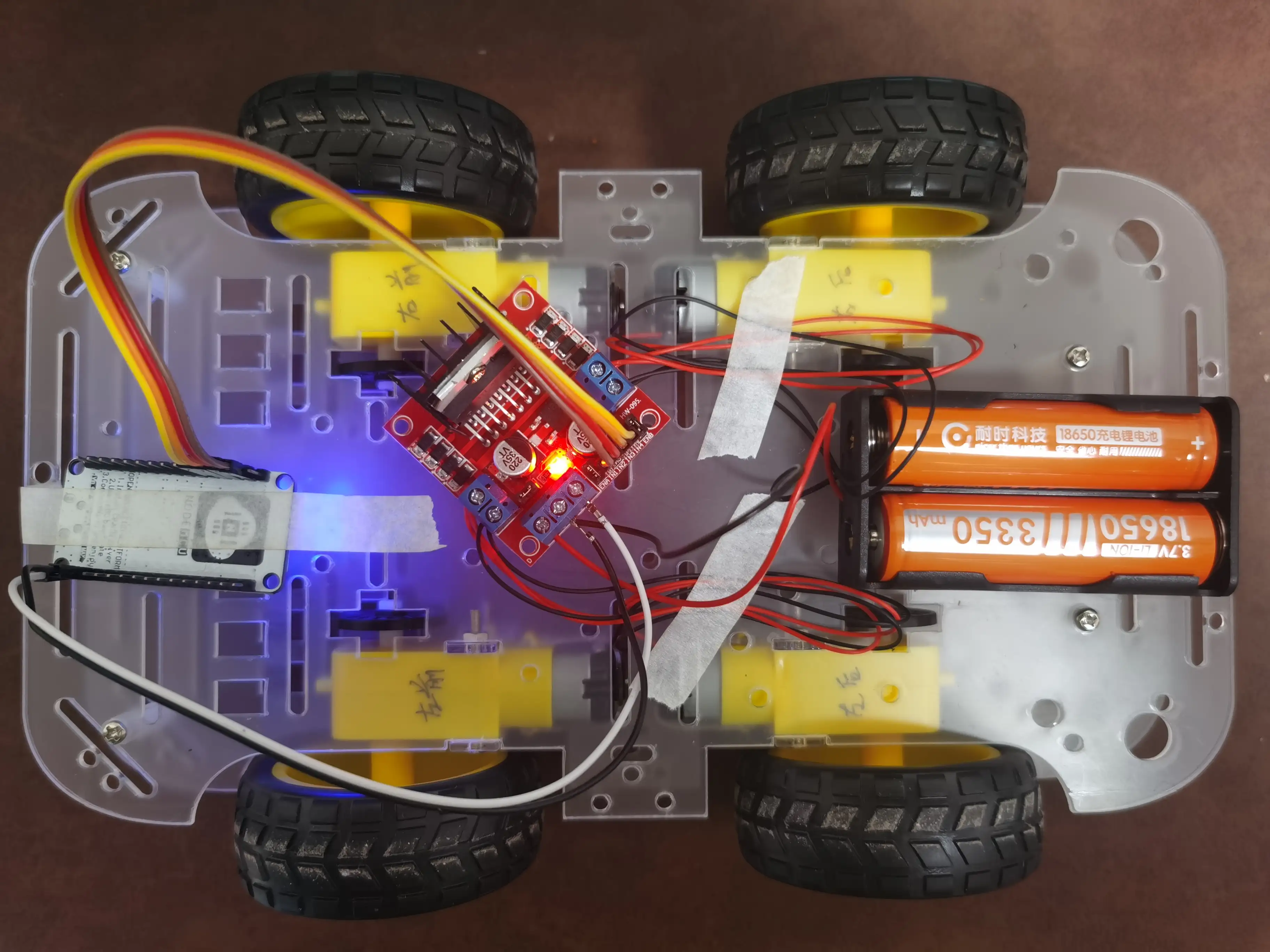
安装小车组件与连线
graph TD;
subgraph L298N
OUT1
OUT2
OUT3
OUT4
IN1
IN2
IN3
IN4
L_power5(+5V)
L_power12(+12V)
L_GND(GND)
end
subgraph 电池盒
正极---L_power12
负极---L_GND
end
subgraph ESP8266
IN1---D1
IN2---D2
IN3---D3
IN4---D4
L_power5---VIN(VIN)
L_GND---E_GND(GND)
end
subgraph 左侧电机
LZ(正)---OUT1
LF(负)---OUT2
end
subgraph 右侧电机
RZ(正)---OUT4
RF(负)---OUT3
end确定电机安装位置与正负极接线
指定4个电机在底盘上的安装位置,用马克笔或标签纸标记安装位置(如左前、右前、左后、右后),通过直流电源提供3V电压测试电机转动方向,当电机转动方向为向前时,将此时通电的胜负极标注好。
使用电烙铁将导线焊接到电机上,正极焊接红色导线,负极焊接黑色导线。
用电烙铁将小车同侧的同色导线焊接到一起,后续一起接入到电机驱动模块的对应引脚。
安装小车底盘
用固定片、螺丝、螺母将电机固定在小车下层底盘上,按照标记的位置安装,安装轮子。
然后使用螺丝和塑料柱将小车底盘的上层板安装到底盘上,将电机线从底盘孔洞拉出。
连接电机驱动模块
将左侧电机正极导线连接到 L298N 电机驱动模块的 OUT1 引脚,将左侧电机负极导线连接到 L298N 电机驱动模块的 OUT2 引脚。
将右侧电机正极导线连接到 L298N 电机驱动模块的 OUT4 引脚,将右侧电机负极导线连接到 L298N 电机驱动模块的 OUT3 引脚。
安装电池盒
用螺丝将电池盒固定在小车底盘上,将电池盒正极导线接到 L298N 电机驱动模块的 +12V 引脚,将电池盒负极导线接到 L298N 电机驱动模块的 GND 引脚。
连接开发板
用杜邦线将 ESP8266 的 D1、D2、D3、D4 引脚分别连接到 L298N 电机驱动模块的 IN1、IN2、IN3、IN4 引脚。
用杜邦线将 ESP8266 的 VIN 引脚连接到 L298N 电机驱动模块的 +5V 引脚,将 ESP8266 的 GND 引脚连接到 L298N 电机驱动模块的 GND 引脚。
Blinker APP 配置
从点灯科技官网 下载 Blinker APP 并安装到手机上,注册账号并登录。
点击 APP 右上方角的 + 按钮,添加一个新的设备,设备类型选择 独立设备,然后选择 网络接入,等待设备注册完成。注册完成后会给此设备生成一个认证码,记录下来,ESP8266 开发板需要使用这个认证码进行连接。
进入设备的可视化UI配置页面,添加5个按键,分别对应前进、后退、左转、右转、停止操作,组件名称分别为 btn-forward、btn-backward、btn-left、btn-right、btn-stop,这里的组件名称需要记录下来,后续在代码中会使用到这些名称。
所有按键类型选择 普通按键 类型,修改显示文本和图标为对应的操作图标。
代码
安装 Blinker 库
打开 Arduino 软件,进入 项目 -> 加载库 -> 管理库,搜索 Blinker,安装 Blinker 库。
编写控制代码
在 Arduino 中新建一个项目,选择 ESP8266 作为开发板,将代码保存为 ESP8266WiFiRemoteCar.ino。
主要代码逻辑:
- 定义 Blinker 认证码、WiFi名称、WiFi密码
- 定义引脚:IN1、IN2、IN3、IN4
- 定义按钮对象:ButtonForward、ButtonBackward、ButtonLeft、ButtonRight、ButtonStop,分别对应 blinker 中前进、后退、左转、右转、停止操作按钮,按钮名称要和Blinker APP中配置的按钮名称一致。
- 定义回调函数:forwardCallback、backwardCallback、leftCallback、rightCallback、stopCallback,用于响应按钮的状态变化,当检测到按钮被按下时,调用对应的回调函数,实现对电机的控制。
- 定义运动控制函数:moveForward、moveBackward、moveLeft、moveRight、stopStop,分别对应前进、后退、左转、右转、停止操作。
- setup 函数:初始化串口、Blinker 库、引脚模式,将按钮对象与回调函数关联起来。
- loop 函数:调用
Blinker.run()函数,等待Blinker 库处理指令
1 |
|
上传代码
使用数据线将 ESP8266 开发板连接到电脑,然后在 Arduino 中点击 上传 按钮,将代码上传到 ESP8266 开发板上,等待上传完成。
上传完成后,点击开发板上复位按钮,等待开发板重新启动接入WiFi,然后就可以在 Blinker APP 中看到设备在线了。
测试
断开开发板和电脑的连接,将 18650 电池安装到电池盒中,等待开发板上电完成,在 Blinker APP 中查看设备是否在线。
等到设备在线后,按住 APP 中的前进按钮,小车开始前进,说明功能正确。依次测试其它按钮功能,确认是否正常。
参考资料
- 点灯科技官网:https://diandeng.tech/home
- 点灯科技WiFi按钮示例代码:https://github.com/blinker-iot/blinker-library/blob/master/examples/Blinker_Widgets/Blinker_Button/Button_WiFi/Button_WiFi.ino
总结
通过这个项目,学习到了 L298N 驱动电机的使用方法,以及如何使用 Blinker 库实现 WiFi 远控小车的功能。